iRobot® Create® 3 Webserver - Application
The Application menu normally has two options: "Configuration" and "Restart Application." When the robot is acting as an access point, a third option, "Reboot robot," appears.
Restart Application
Clicking "Restart Application" will restart the robot's ROS 21 application. This will take a few seconds to complete. Restarting the application is necessary after modifying ROS 2 configuration settings. Restarting the application will not restart the webserver; they are separate applications.
Reboot Robot
Clicking "Reboot Robot" will completely reboot the robot. This will take multiple minutes to complete.
Application Configuration
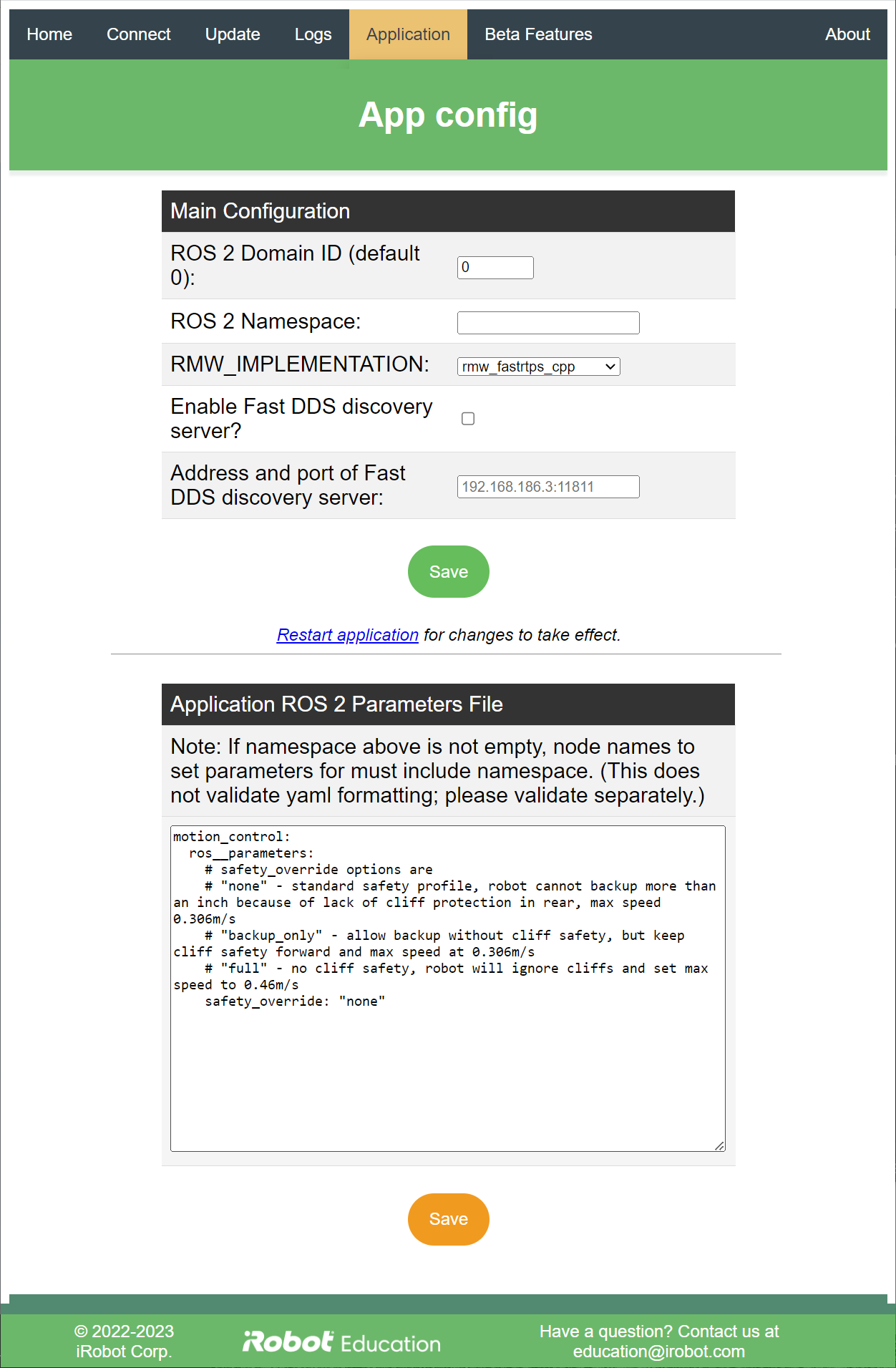
There are two configuration sections on this page. After saving either section, it is required to restart the application for changes to take effect.
Main Configuration
The main configuration includes ROS 2 domain ID, namespace, and RMW Implementation. Basic information about these settings can be found on this docs site both in the ROS 2 Middleware Configuration and Multi-Robot Setup pages. Further details on these settings can be found in the official ROS 2 documentation.
For robots running Galactic >= G.4 and Humble >= H.1, when Fast-DDS is selected as the RMW, it is possible to direct the robot to use an offboard Fast-DDS Discovery server, as well. Further details on the Fast-DDS Discovery Server can be found here.
When running Create 3 firmware for Iron, only one middleware selection is available at a time; to switch middleware, it is necessary to install the matching firmware.
Application ROS 2 Parameters File
This is a raw yaml file used for configuring ROS 2 parameters. The web server will not validate this yaml file; setting it incorrectly may cause the application to fail to start properly. Details of this will be found in the logs. If this happens, the parameters file can again be edited and saved in the web server in order to correct the problem. An official ROS 2 tutorial on parameters can be found here.